本系统基于轻型长航程AUV为载体,通过搭载水下多参数传感器及水下侧扫声呐,获取水质参数及水底的地形地貌信息;基于稳健水声通信技术实现水下多参数传感器的实时回传,实现水质信息的原位监测;通过智能水下平台控制算法,可实现航迹自主规划,提高了监测任务的灵活性。同时可根据应用水域、水流等环境选配不同的水下无人自主航行器,可为水质环境监测、水下排污点定位取证等提供完整的技术方案。

图1 可用于海洋内河等复杂水域环境具备水质监测及水下地形扫描功能的水下无人自主航行器
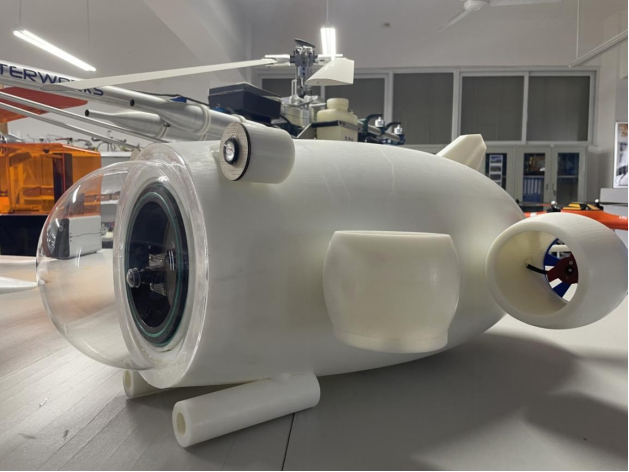
图2 可用于湖泊等简单水域环境具备水质监测及拍照取证功能的水下无人自主航行器