您好、欢迎访问桂林航天工业学院技术转移中心!
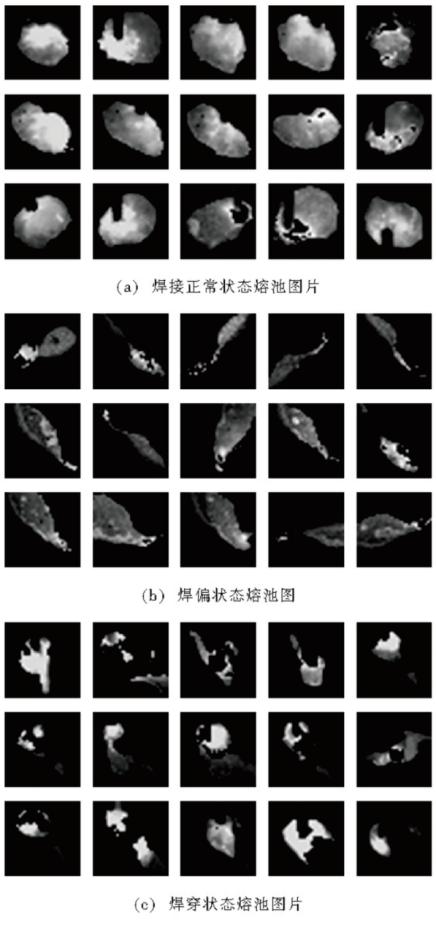
该成果解决焊接过程中机器人和变位机系统的自由度解耦和运动分解,实现机器人变位机协调工作;并将机器视觉与机器人变位机工作站融为一体,对短路焊接熔池进行实时跟踪,从而获得焊缝外观平滑美观的焊件,保证焊接质量和外观质量的要求。该成果获得2016年广西科技进步奖三等奖。
系统采集实时焊接熔池图
上一条:高校事务管理网络信息应用系统
下一条:龙门式自动上料机构
桂林航天工业学院 技术转移中心 @ 版权所有 联系电话:0773-2253039 电子邮箱:kjc@guat.edu.cn