为深入贯彻落实自治区党委对桂林的有关指示要求,充分发挥高校科研院所科技创新资源优势,搭建市校对接和产学研深度融合平台,推动科技成果高效转化,助力桂林产业升...
5如有转化需求,可联系科技处成果科杨老师,骆老师,0773-2253033
基于国家自然科学基金项目“基于电子罗盘与MEMS陀螺仪的微型捷联航姿参考系统中姿态互补滤波与误差补偿研究”,研发的磁惯导系统已经在无人机产品应用。 磁惯导系统应用...
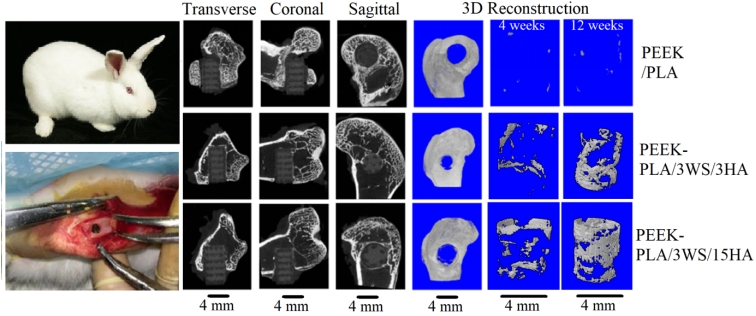
研究了PEEK/PLA多孔骨骼支架的成型,分析了界面融合机理,揭示了FDM工艺、梯度孔隙结构和材料配比对力学和生物性能的影响规律。结果表明,PLA填充PEEK多孔支架的孔隙,...
桂林航天工业学院 技术转移中心 @ 版权所有 联系电话:0773-2253039 电子邮箱:kjc@guat.edu.cn