1.团队简介
团队带头人刘晓刚:博士,教授,硕士导师。在二氧化碳气体保护焊焊接过程的焊缝跟踪焊缝图像特征提取和熔池图像特征提取问题上取得了较好的成效,先后完成了“基于弧光反射的弧焊工业机器人智能跟踪焊缝系统关键技术研究”、“视觉辅助机器人变位机多工位焊接关键技术研发与应用”等省市及企业委托项目10余项。在《焊接学报》等期刊和国际重要学术会议上发表学术论文20余篇,获发明专利15项,实用新型专利37项,软件著作权5项。承担国家级项目2项,承担自治区级项目12项,重大专项1项。获内蒙古科技进步二等奖1项,获广西科技进步奖三等奖1项。
目前团队成员19人,其中教授4名,副教授7名,高级工程师6人,博士4人。主要开展焊接材料与工艺特性分析、图像获取与信息处理、机器人作业系统的设计与研发、工装胎具设计理论与制造工艺、振动机理与实验分析等领域研究。
2.科研服务方向
(1)焊接材料与工艺研究
(2)图像采集与信息人工智能处理
(3)工业生产自动化、装配自动化
(4)焊接自动化成套设备设计与制造
(5)工装胎具设计与制造工艺
(6)机器人编程
(7)安川机器人应用教学培训
(8)焊接机器人自动化系统设计
(9)其他特殊非标设备研制
3.特色成果
(1)机器人焊接工艺信息与熔池形态高速智能处理系统
该成果解决焊接过程中机器人和变位机系统的自由度解耦和运动分解,实现机器人变位机协调工作;并将机器视觉与机器人变位机工作站融为一体,对短路焊接熔池进行实时跟踪,从而获得焊缝外观平滑美观的焊件,保证焊接质量和外观质量的要求。该成果获得2016年广西科技进步奖三等奖。
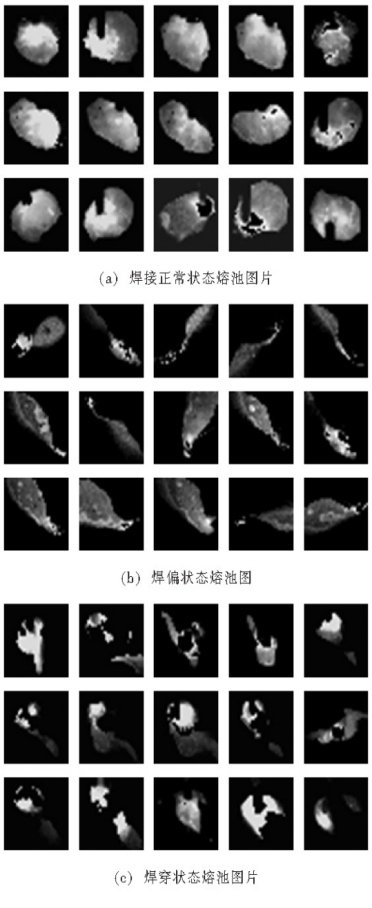
图1 系统采集实时焊接熔池图
(2)龙门式自动上料机构
该机构能够对液压机原料自动上下料,实现高速、自动、安全生产的目的,为企业创造价值。

图2 “龙门式自动上料机构”鉴定验收现场
(3)塔吊部件多工位双机器人焊接系统
该系统包含两个工位及两台焊接机器人系统,由控制柜控制变位机及机器人协同工作,双机器人能够相互协作同时焊接8种塔吊部件,焊接质量及焊缝外观均满足企业要求。

图3 系统整体结构

图4 系统控制柜

图5 系统在工作中

图6 焊接效果
(4)全自动避孕套电子检测设备
与某乳胶制品企业合作研发设计的“全自动避孕套电子检测设备”,获得6项实用新型专利,2项国家发明专利,目前已经进入中试生产阶段。

图7 全自动避孕套电子检测设备
(5)线缆自动成盘包装机
与某电缆生产企业合作研发的“线缆自动成盘包装机”,用于线缆的自动成盘并完成包装,大大提高了线缆生产的连续自动化水平。已投入使用并稳定运行三年,获得了5项实用新型专利,2项发明专利,每台设备创造年产值1000万元。

图8 线缆自动成盘包装机
(6)特定狭窄空间焊接专用焊接机械手与旋转变位机系统
本项目针对磨粉机关键部件--风轮,解决狭窄空间条件下风轮叶片的自动焊接问题,从而提高特殊构件焊接质量,提高生产效率。焊接速度上是人工焊接速度的4-6倍,焊接质量稳定,系统可以减少人工劳动强度,提高焊接品质,提高生产效率和生产安全性,焊接现场整洁规范,减少用工成本。特别适用于窄缝等普通焊枪无法达到的特殊焊接,焊接对象产品应用于机械设备散热,干燥,送风,抽风,风循环等,适用的企业包括涂装设备、食品机械、烘干设备、涂布机械、消毒设备、矿山机械制造等。

图9 系统主要部分
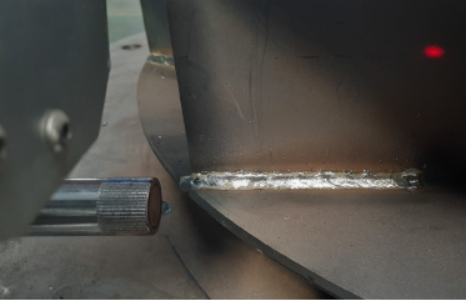
图10 焊接效果
4.团队联系方式
联系人:郑利华 电话:13097730666 邮箱:379841885@qq.com